Log In
Log In Register Now!
Register Now! Help
Help





Quote
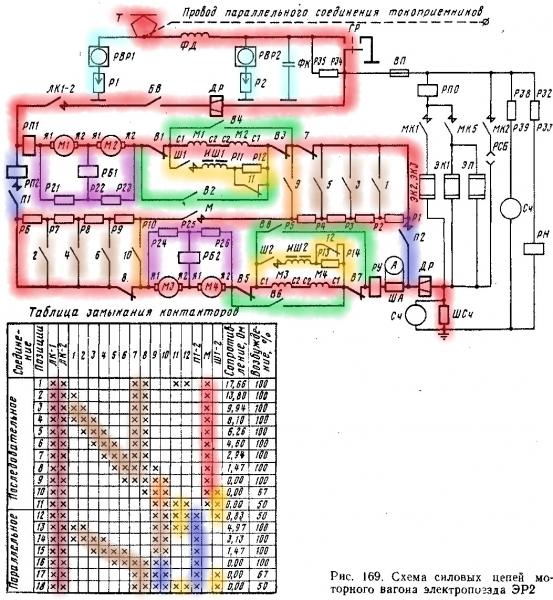
Силовой контроллер КСП-1А с электропневматическим приводом системы проф. Л. Н. Решетова имеет 12 контакторных элементов; общее количество позиций контроллера 18, из них 1-я соответствует маневровому режиму, 2-8-я-реостатному пуску при последовательном соединении всех четырех тяговых электродвигателей, 9-я-последовательному соединению электродвигателей с выведенными из цепи пусковыми резисторами, 10-я-промежуточной ступени ослабления возбуждения (67%), 11-я-второй ступени ослабления возбуждения (50 % ) 12-я- параллельному соединению тяговых электродвигателей с возбуждением 50% и включенными реостатами, 13-15-я-реостатному пуску при параллельном соединении электродвигателей и 100% возбуждения, 16-я-параллельному соединению (две параллельно включенные группы по два последовательно включенных электродвигателя) при 100% возбуждения, 17-я-промежуточной ступени возбуждения (67%) и 18-я-50% возбуждения электродвигателей при их параллельном соединении.
Контроллеры машиниста, встроенные в пульты управления, имеют по две рукоятки: реверсивную и главную. Реверсивные имеют три положения: вперед, 0, назад, главная рукоятка-восемь положений: нулевое, маневровое, 1-е ходовое (соответствующее 9-й позиции силового контроллера-КСП),2-е ходовое (соответствующее 11-й позиции КСП), положения 2А и ЗА для ручного пуска, 3-е ходовое (соответствующее 16-й позиции КСП) и 4-е ходовое (соответствующее 18-й позиции силового контроллера).
Контроллеры машиниста, встроенные в пульты управления, имеют по две рукоятки: реверсивную и главную. Реверсивные имеют три положения: вперед, 0, назад, главная рукоятка-восемь положений: нулевое, маневровое, 1-е ходовое (соответствующее 9-й позиции силового контроллера-КСП),2-е ходовое (соответствующее 11-й позиции КСП), положения 2А и ЗА для ручного пуска, 3-е ходовое (соответствующее 16-й позиции КСП) и 4-е ходовое (соответствующее 18-й позиции силового контроллера).
Quote
При автоматическом пуске поворот вала силового контроллера на следующую позицию происходит при уменьшении тока тягового электродвигателя до 170-180 А; возможен пуск при меньших токах перехода на следующие позиции - 125А, для чего машинист должен нажать кнопку «Пониженное ускорение». При боксованин одной из колесных пар реле боксования воздействует на реле ускорения и ток отпадания его снижается до 70 А.
http://scbist.com/sc...da/er2r_29.html
(Main controller's description)
https://electri4ka.c...2r/er2r_60.html
(more advanced design with electro-dynamic braking, rheostatic-regenerative)