 Log In
Log In Register Now!
Register Now! Help
Help

Hi All -
I have been gradually realizing that in recent OR versions the time delay in switching between throttle operation and dynamic brake seems to have shrunk significantly, until it looks more like MSTS.
Although I remember some users complaining about this delay, I thought that there had to be a measurable time delay in switching the relays,etc. in a diesel-electric locomotive.
Is it something in my installation, or has there been a change in principle?
(Sorry for the typo in the heading!)
What happened to the deal in switching from throttle to dynamic braking?
Rate Topic:

#1

- Conductor
-

- Group: Status: Contributing Member
- Posts: 463
- Joined: 12-February 13
- Gender:Male
- Location:Canada
- Simulator:Open Rails / MSTS
-
Country:

Posted 30 November 2013 - 08:46 AM
#2
- Conductor
-

- Group: Private - Open Rails Developer
- Posts: 322
- Joined: 31-May 11
- Gender:Male
-
Country:

Posted 30 November 2013 - 12:44 PM
 Sid P., on 30 November 2013 - 08:46 AM, said:
Sid P., on 30 November 2013 - 08:46 AM, said:
Hi All -
I have been gradually realizing that in recent OR versions the time delay in switching between throttle operation and dynamic brake seems to have shrunk significantly, until it looks more like MSTS.
Although I remember some users complaining about this delay, I thought that there had to be a measurable time delay in switching the relays,etc. in a diesel-electric locomotive.
Is it something in my installation, or has there been a change in principle?
(Sorry for the typo in the heading!)
I have been gradually realizing that in recent OR versions the time delay in switching between throttle operation and dynamic brake seems to have shrunk significantly, until it looks more like MSTS.
Although I remember some users complaining about this delay, I thought that there had to be a measurable time delay in switching the relays,etc. in a diesel-electric locomotive.
Is it something in my installation, or has there been a change in principle?
(Sorry for the typo in the heading!)
Yes, it has changed. But as noted users did complained about the delay, which was a fixed value of X seconds or so. IMHO this should be an option like the Alerter to be enabled or not, and have a tunable # of seconds if enabled.
#3
- Chairman, Board of Directors
-

- Group: ET Admin
- Posts: 13,927
- Joined: 21-February 06
- Gender:Male
- Location:Way, way, way, South
- Simulator:MSTS & OR
-
Country:

Posted 30 November 2013 - 06:06 PM
Quote
(Sorry for the typo in the heading!)
Repaired with moderator's magic pencil.
#4
- Member, Board of Directors
-

- Group: Status: Elite Member
- Posts: 6,999
- Joined: 31-December 11
- Gender:Male
-
Country:

Posted 30 November 2013 - 11:34 PM
Hm Captain, I believe the magic pencil should have written "delay"... :jawdrop2:
#5
- Superintendant
-
- Group: Status: Elite Member
- Posts: 1,772
- Joined: 27-October 12
- Gender:Male
- Location:Budapest
- Simulator:OpenRails
-
Country:

Posted 01 December 2013 - 12:48 AM
After some investigation: It was changed by Chris Jakeman in r1829, in MSTSLocomotive.cs line
Chris prefixed the non-MSTS option parameters by "ORTS" string in that revision. But I believe he changed this line accidentally, since this option is not OR specific, this exists in MSTS. But I also see, that the value set in .eng file must be divided by 2 or 3, to get the same time in seconds as it was in MSTS.
case "engine(ortsdynamicbrakesdelaytimebeforeengaging": DynamicBrakeDelayS = stf.ReadFloatBlock(STFReader.UNITS.Time, null); break;
Chris prefixed the non-MSTS option parameters by "ORTS" string in that revision. But I believe he changed this line accidentally, since this option is not OR specific, this exists in MSTS. But I also see, that the value set in .eng file must be divided by 2 or 3, to get the same time in seconds as it was in MSTS.
#6
- Vice President
-
- Group: ET Admin
- Posts: 2,866
- Joined: 03-May 11
- Gender:Male
- Location:Peterborough, UK
- Simulator:Open Rails
-
Country:

Posted 01 December 2013 - 03:41 AM
Hi Peter,
Thanks for digging in and finding this. I'll post again later today.
gpz, on 01 December 2013 - 12:48 AM, said:
After some investigation: It was changed by Chris Jakeman in r1829, in MSTSLocomotive.cs line
case "engine(ortsdynamicbrakesdelaytimebeforeengaging": DynamicBrakeDelayS = stf.ReadFloatBlock(STFReader.UNITS.Time, null); break;
Thanks for digging in and finding this. I'll post again later today.
#7
- Conductor
-
- Group: Status: Contributing Member
- Posts: 463
- Joined: 12-February 13
- Gender:Male
- Location:Canada
- Simulator:Open Rails / MSTS
-
Country:
Posted 01 December 2013 - 05:36 AM
Hi All-
Thanks for the quick response!
Sid P.
Thanks for the quick response!
Sid P.
#8
- Engineer
-
- Group: Status: Contributing Member
- Posts: 652
- Joined: 10-October 10
- Gender:Male
- Location:Kansas
- Simulator:Open Rails
-
Country:
Posted 01 December 2013 - 07:54 AM
Personally, I hope the setup "delay" is brought back to dynamic brakes because it is prototypical. The issue will always be the conflict between a "simulator" and a "game." OR has tended toward being a simulator--which I like--versus, say, TS2014, where the physics and operation tends to be more of a game. Of course, if OR was run by the player as a true simulator, few people would have the patience to run it--hours-long waits on sidings, simple (but rule-required) air brake tests that can take an hour, waiting for a hour or more while the brakeman "knocks down" the handbrakes on a long cut of cars, only making it 12 miles in a 12-hour shift because of opposing train traffic, waiting for a half-hour in the middle of nowhere for the Dispatcher to answer the radio and give you a new track warrant, two hours spent sitting while the conductor inspects the train after setting off a defect detector, etc. And, of course, not being able to talk on the cell phone, text, or nap while one is engaged in all that thumb-twiddling while waiting.
#9
- Vice President
-
- Group: ET Admin
- Posts: 2,866
- Joined: 03-May 11
- Gender:Male
- Location:Peterborough, UK
- Simulator:Open Rails
-
Country:
Posted 01 December 2013 - 11:31 AM
cjakeman, on 01 December 2013 - 03:41 AM, said:
Thanks for digging in and finding this. I'll post again later today.
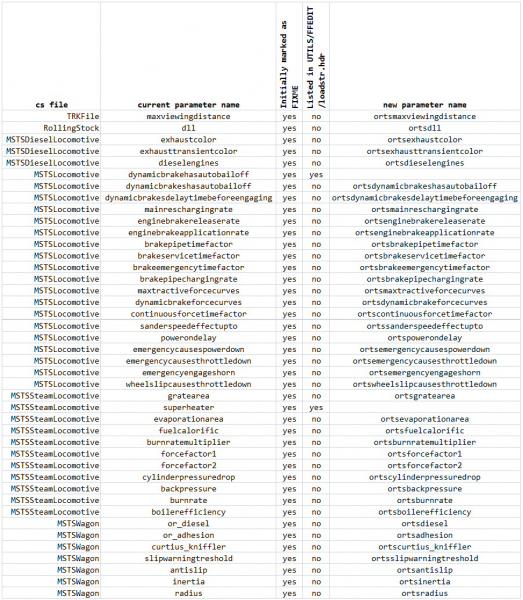
I added the ORTS prefix to a number of parameters which seemed to be ORTS-specific, so that we could protect our ability to read MSTS files. Most were marked in the code with //FIXME and all were compared with the list in MSTS\UTILS\FFEDIT\loadstr.hdr . Looks as though I slipped up on this one. (For the team, the thread is here.)
The current list follows (and is repeated in the appendix of our manual - from page 86).
Please check this list. If there are any other parameters which have mistakenly gained the ORTS prefix, we should fix those too. I'll wait to hear feedback, then make the changes.
Thanks,
#10
- Vice President
-
- Group: ET Admin
- Posts: 2,866
- Joined: 03-May 11
- Gender:Male
- Location:Peterborough, UK
- Simulator:Open Rails
-
Country:
Posted 03 December 2013 - 11:14 AM
Hi Sid,
I've restored the parameter DynamicBrakesDelayTimeBeforeEngaging in v1879 (and revised the manual to match).
Does it work OK for you now?
Sid P., on 01 December 2013 - 05:36 AM, said:
Thanks for the quick response!
I've restored the parameter DynamicBrakesDelayTimeBeforeEngaging in v1879 (and revised the manual to match).
Does it work OK for you now?